La commande d’aiguillage par servomoteurs est une solution efficace et économique pour automatiser un réseau ferroviaire miniature. Grâce à leur précision et leur fiabilité, les servomoteurs permettent un mouvement fluide et réaliste des aiguillages, tout en offrant une grande souplesse de réglage.
Dans cette section, vous découvrirez différentes méthodes pour intégrer des servomoteurs à vos maquettes : branchement, alimentation, pilotage via Arduino ou systèmes DCC. Que vous soyez débutant ou modéliste confirmé, ces techniques vous aideront à améliorer le réalisme et la fiabilité de vos réseaux ferroviaires.
L’utilisation de servomoteurs pour la commande des aiguillages en modélisme ferroviaire présente plusieurs avantages par rapport à d’autres systèmes (électromagnétiques, moteurs lents) :
1. Précision et réalisme des mouvements
Un servomoteur permet un mouvement fluide et progressif de l’aiguillage, simulant ainsi de manière plus réaliste le basculement d’une aiguille, contrairement aux solénoïdes qui provoquent des mouvements brusques.
2. Contrôle de la vitesse et de la position
Les servomoteurs offrent un contrôle précis de la position angulaire, permettant d’ajuster avec finesse la course de l’aiguillage. On peut aussi contrôler la vitesse de basculement, donnant un aspect plus naturel au changement d’itinéraire.
3. Silence
Les servomoteurs sont généralement plus silencieux que les systèmes électromagnétiques ou les moteurs classiques, améliorant ainsi l’immersion sonore du réseau de modélisme.
4. Faible consommation d’énergie
Un servomoteur consomme généralement moins d’énergie qu’un système électromagnétique, qui nécessite souvent un courant intense pendant un court instant. Cela peut être un avantage pour éviter de surcharger l’alimentation du réseau.
5. Fiabilité et longévité
Contrairement aux systèmes à impulsions électromagnétiques, les servomoteurs subissent moins de chocs mécaniques, ce qui prolonge leur durée de vie et améliore la fiabilité à long terme.
6. Programmable
Grâce à leur compatibilité avec les systèmes numériques comme DCC (Digital Command Control) ou des microcontrôleurs (Arduino), les servomoteurs peuvent être intégrés dans des réseaux automatisés et contrôlés à distance. On peut programmer des scénarios complexes avec des basculements d’aiguillages synchronisés ou déclenchés par des événements spécifiques.
7. Taille compacte
Les servomoteurs sont généralement petits et faciles à intégrer dans des réseaux de modélisme ferroviaire, même ceux de petite échelle comme le HO ou N.
Ces caractéristiques font que les moteurs des aiguillages du réseau HO de l’UAICF Nevers-Vauzelles sont remplacés progressivement par des servomoteurs.
La réalisation de l’UAICF Nevers-Vauzelles
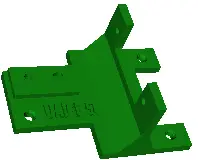
Le support du servomoteur peut-être réalisé en impression 3D ou en bois avec une découpeuse laser.
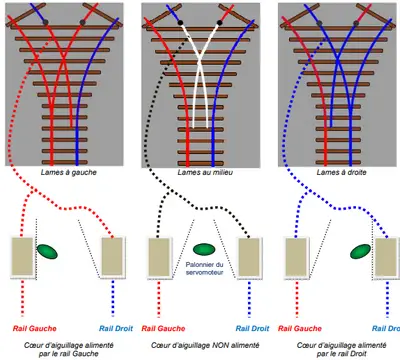
Il est possible de mettre en œuvre des fins de course (contacteurs) pour gérer l’alimentation du cœur d’aiguillage quand il n’est pas isolé.
La section Modélisme a réalisé un programme pour des cartes Arduino UNO et NANO que l’on peut mettre en œuvre sans aucune connaissance en programmation.
On téléverse le programme et les paramètres de réglages (vitesse, angle mini, angle maxi, adresse DCC) sont enregistrés dans la mémoire Eeprom de la carte.
Pour faciliter la configuration, une application a été réalisée avec le logiciel « Processing« .
Processing est un langage de programmation et un environnement de développement open-source conçu pour la création visuelle et interactive. Outil gratuit, il est idéal pour les projets créatifs et éducatifs, avec une syntaxe simple et accessible.
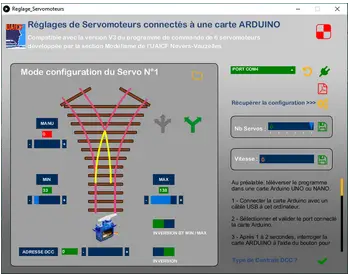
Une application réalisée avec le logiciel "Processing" pour réaliser le réglages des servomoteurs commande par une carte Arduino UNO ou NANO.
L'application permet de configurer :
- jusqu'à 6 servomoteurs pour 6 aiguillages simples ou 3 aiguillages triple ;
- les adresses DCC individuellement des 6 servomoteurs ;
- les positions mini et maxi des servomoteurs ;
- la vitesse de rotation.
Fichier du programme Arduino pour commander 6 servomoteurs en analogique et/ou DCC.
Pour la configuration / paramétrages de la vitesse, angle, position mini et maxi, on utilise le moniteur série du logiciel Arduino.
Pour faciliter le paramétrage l'UAICF Nevers-Vauzelles a réalisé une application dédiée avec le logiciel gratuit "Processing".
Tutoriel pour utiliser le programme Arduino pour commander des servomoteurs en analogique et/ou digital
Aucune connaissance en programmation est nécessaire : il suffit juste de téléverser le programme et de paramétrer la carte. Les données sont enregistrées dans la mémoire Eeprom, ce qui permet de conserver les réglages après une mise hors tension de la carte Arduino.
On peut configurer la vitesse, angle, adresse DCC, position mini et maxi. Pour cela, on utilise le moniteur série du logiciel Arduino ou une application réalisée par l'UAICF Nevers-Vauzelles avec le logiciel "Processing". L'application communique avec le port série (port COM).